
、感应电机而言,它具有高的转速/扭矩比、好动态特性、高效率、长寿命、低噪声、宽转速规模和制作简略等等优秀特性。使其在
针对此航晶微前期推出了多款电机驱动相关这类的产品,其间HJ4312伺服电机闭环操控器与其调配的HJG4306三相电机驱动电路模块这两款厚膜集成电路在航空28V电机驱动计划运用最为广泛。为满意市场需求产品小型化的问题,航晶微结合自己在电机驱动电路方面的堆集的经历,经过不断学习,现推出一款全新一体化的三相电机驱动电路模块HJ4314,只需简略的外围电路,便可独立完结对三相无刷电机的操控。

HJ4314是一款彻底国产化三相电机驱动电路模块。内部由三相霍尔解码器、速度反应环、单稳多谐振荡器、PWM操控器,电流门限比较器等部分组成。
原理是三相无刷电机霍尔信号固定脉宽后给PWM操控器中的差错放大器完结转速反应,内置固定衰减周期的整流电路,电流门限比较器回转后会将输出的上桥臂关断,电流衰减一个固定的时刻周期,依据三相无刷电机被操控或许的转速改变规模和扭距改变规模,外部调理PI参数,来完结在给定转速设置时安稳转速方针。
一起具有使能操控、方向操控、霍尔信号脉冲整形、电源接反维护、输入/输出浪涌维护的功用。封装选用DZS2826外壳(28*26*7mm)。HJ4314三相电机驱动电路模块适用于40V以下的伺服体系。

1) 全硬件结构,防止了用DSPCPLD形式实现时,上电树立时刻长的缺陷;
2)模仿PID环路没有了DSP数字PID环路的量化噪声,超调量更简略设置;
4)依托三相无刷电机的三相霍尔信号就能给定完结转速反应,无需外加转速丈量设备;
假如希望最大电机速度为3000RPM,而且所运用的电机转子上的永磁体具有一对磁极,则电机每次机械旋转一周将会使每个霍尔效应传感器传递一个脉冲周期,三个传感器将发生三个独立的脉冲周期,一起转速反应信号VF端将发生一个脉冲周期数为3的脉冲信号,每个脉冲别离对应传感器脉冲的上升沿和下降沿。电机每秒转速50转,转速反应信号将每秒发生150脉冲或具有150赫兹的频率(转速反应信号频率为霍尔信号频率的3倍)。因而,转速反应信号脉冲周期为6.66毫秒,转速反应信号脉冲宽度可设定为反应信号脉冲周期的70%~80%,计算公式如下:
注:0.96为单稳态震动电路的时刻常数。Rx为转速反应信号脉宽设定电阻,Cx为转速反应信号脉宽设定电容值为22nF。
体系运用时,在转速固定的情况下,Rx和Cx运用相同的参数匹配不同的三相电机驱动电路模块模块,所设定的脉冲宽度因双稳态多谐振荡器而存在纤细的差异,因而需对Rx和Cx进行微调,使其设定的脉冲宽度为定值,可有很大成效防止双稳态多谐振荡器带来差错。
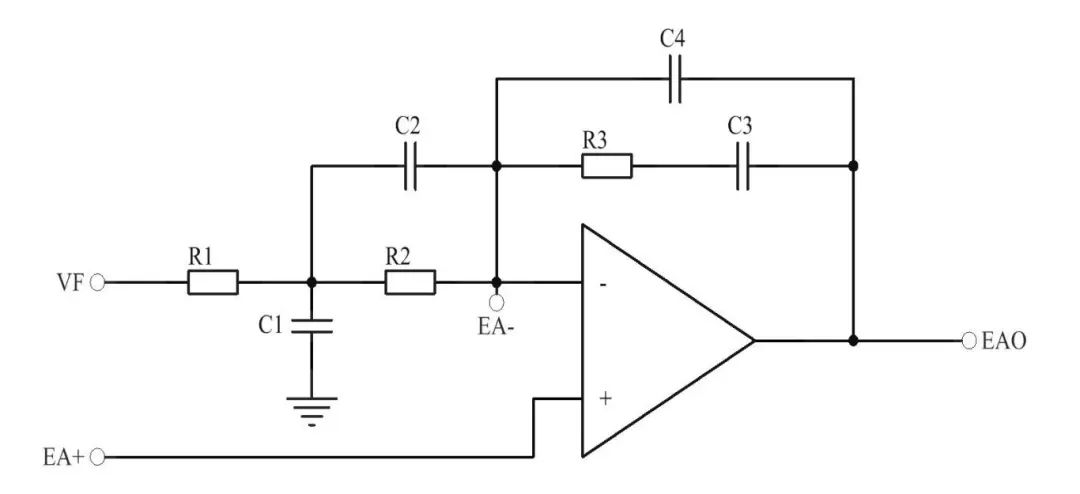
R1、C1的取值首要依据转速反应信号VF的最低频率,即三相无刷电机最低的转速;
R2、R3、C2、C3、C4一起构成PID补偿网络,经过调理PID补偿网络使电机在给定条件下,习惯扭矩改变要求;可依据详细运用工况自行设计PID拓扑结构,以到达对三相无刷电机更好的操控作用。
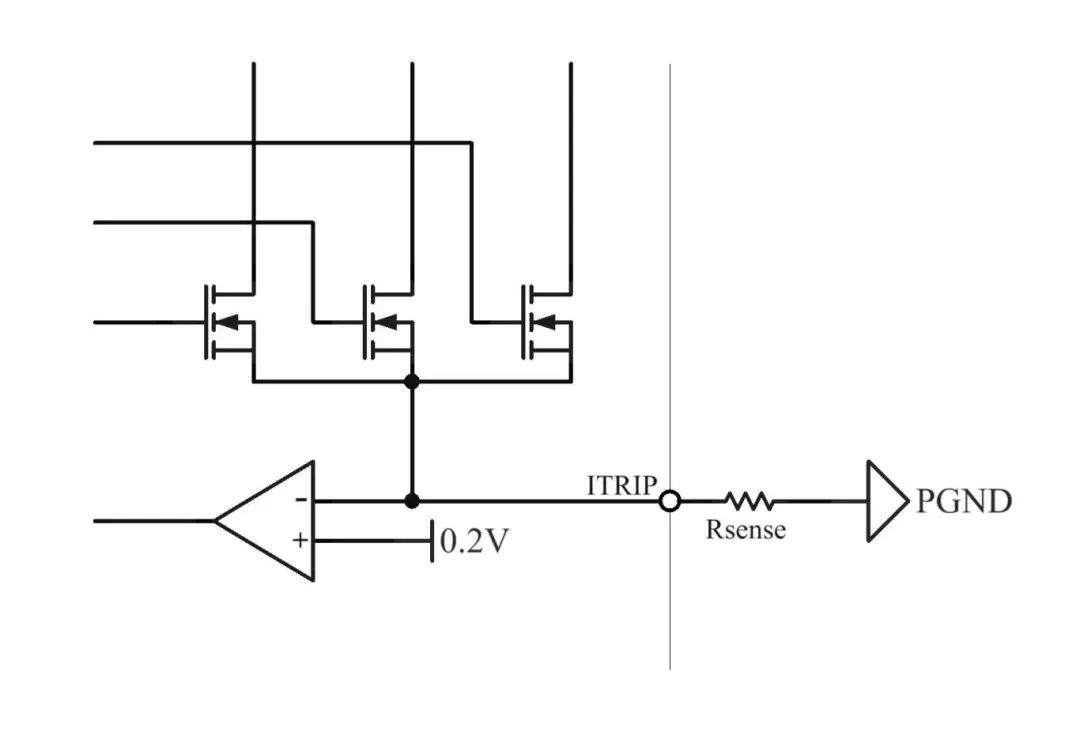
芯片内置固定衰减周期的整流电路,当输出敞开时,电流上升直到整流点Itrip:
方向操控、刹车操控可运用模块内部的光耦进行阻隔,运用上位机来操控方向和刹车,如下图所示:
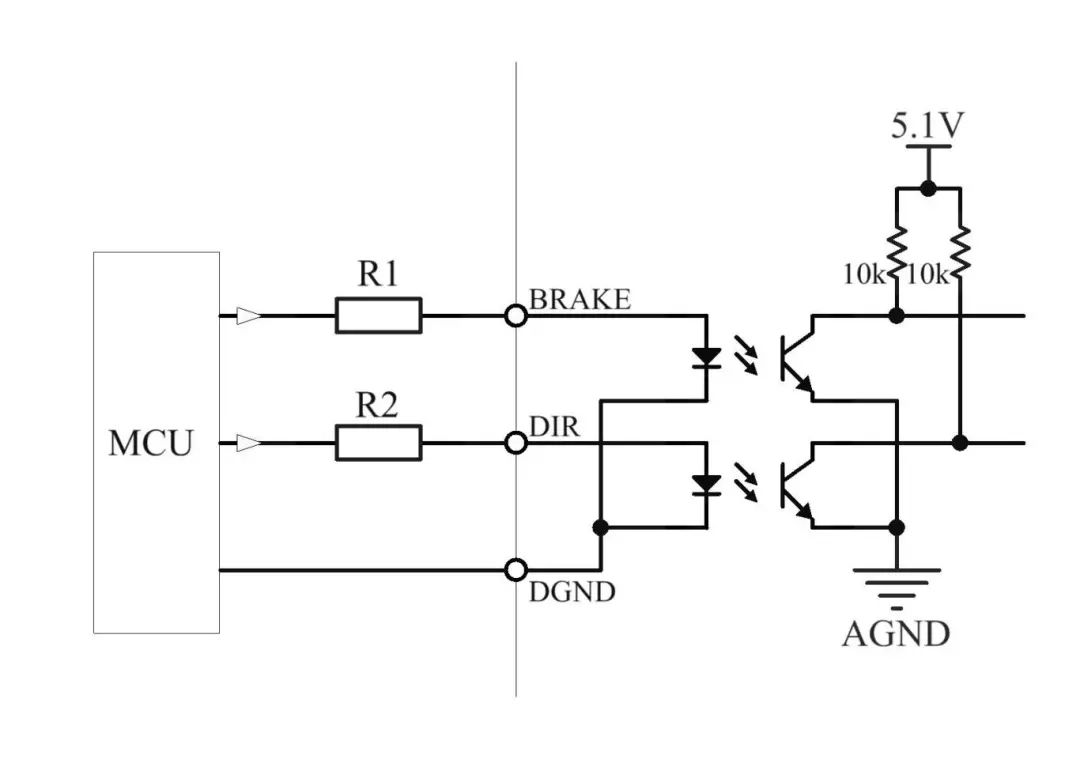
当BRAKE为低时进入刹车形式,为高时驱动正常作业。刹车形式下三个半桥的全部下臂桥MOS都会翻开,用以短路电机发生的反向电动势。BRAKE会屏蔽PWM信号输入功用与主动堵转维护功用。
需求要点指出的是,当刹车态时,因为电流不流经Rsense电阻,内部的PWM电流约束此刻不起作用,此刻的最大电流等于反向电动势除以负载电阻。
1)在运用DIR进行正回转切换时归于无延时硬换向、以及高速刹车会有很大的冲击,所以不主张在高电压全速运行时操作此两项功用,强行操作有或许损坏功率管和芯片。
2)三相电机驱动电路模块功率较小(最大100W内)过载才干弱,运用时留有余量,不行直接大功率电机作业或试机,强行作业有冲击损坏功率管的危险,主张运用在28V/56W以内,如需超越56W功率,主张在U、V、W三相驱动输出端和电机之间串入10~33uH的大功率电感,用来扼制对功率管形成的冲击。
3)三相电机驱动电路模块功用于霍尔电视点为120的直流无刷三相有霍尔的电机,电机需有霍尔且接对线序体系才干正常作业。
图8所示波形为24V供电,0.5A的负载下带载发动的电源电压和电流波形:
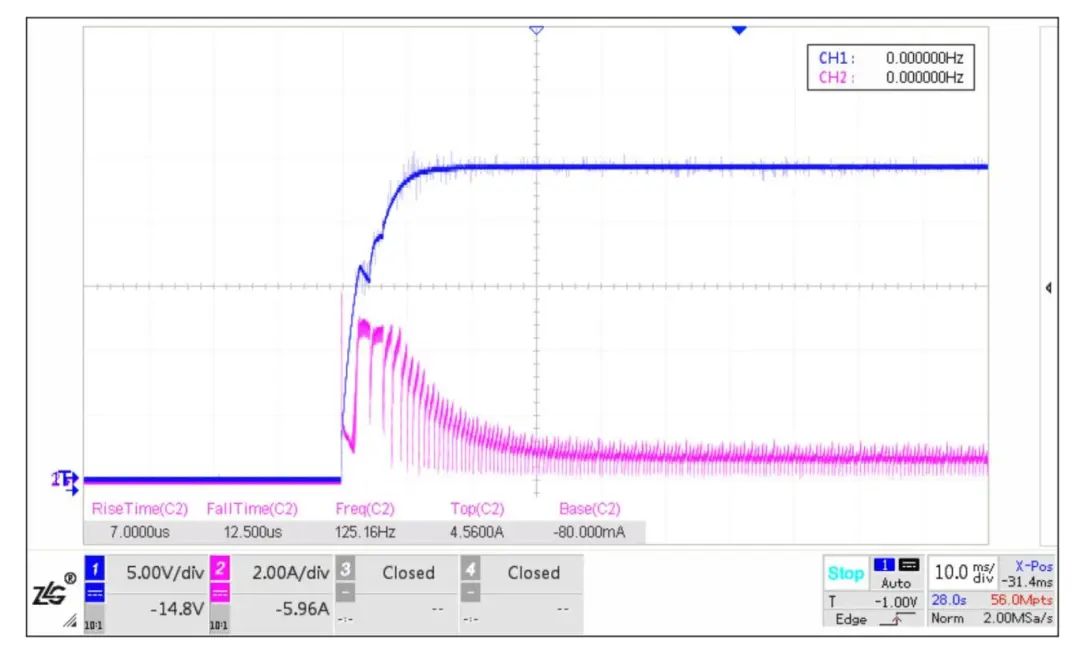
体系内部自带软发动电路,由图8可知,从上电到树立大约需求13ms,在此期间,体系的过冲电流从最大开端逐周期进行递减,到最后趋于安稳值。
图9所示波形为24V供电,0.5A的负载下正常作业时运用DIR功用进行强换向的电源电压和电流波形:
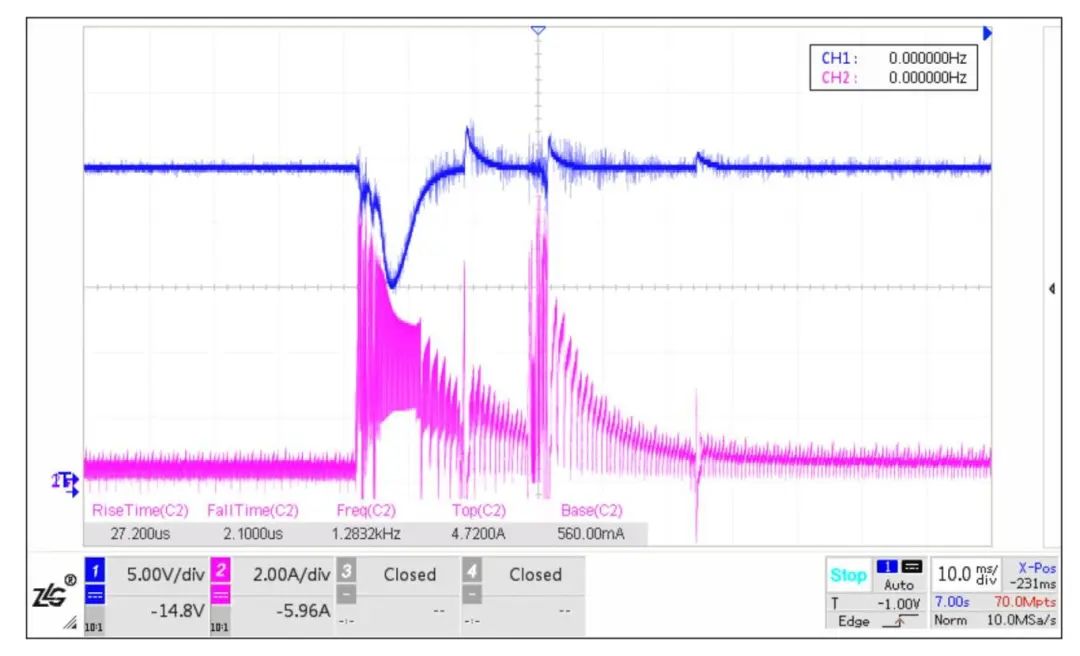
电机在高速作业时运用DIR功用进行强换向,瞬间会对电源形成非常大的冲击,对体系电源的才干要求比较高;久而久之会大幅度的下降该模块的可靠性。禁止在正电源端串入续流二极管来运用DIR功用进行强换向,此举在较高转速下会瞬间焚毁模块内部操控电路。
